Schrittmotor-Steuerung und EEOs über Feldbus
Der AKD kann mit Befehlen, dioe über den Feldbus gesendet werden, einen Schrittmotor steuern oder einen Encoder emulieren.
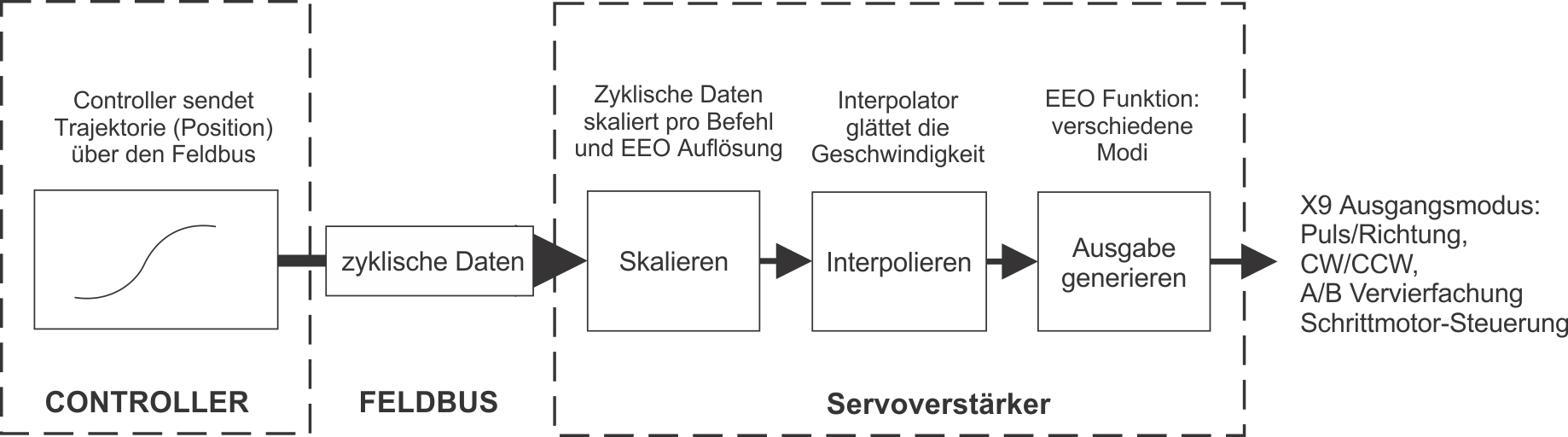
Der Feldbus-Controller sendet Positionsdaten vom Trajektorien-Generator (oder vom Feedback) über den Feldbus zum AKD, wo der Positionswert skaliert und interpoliert (glättet die Geschwindigkeit) wird, bevor die EEO Funktion des AKD die X9 Ausgangssignale erzeugt (Puls/Richtung, CW/CCW oder A/B Vervierfachung). Die Ausgänge können benutzt werden um einen Schrittmotor zu steuern oder um einen Encoder zu emulieren.
Die folgenden Beispiele zeigen die beiden empfohlenen Befehlsformate (mit oder ohne Nachkommastellen) und die drei verfügbaren Ausgangsmodi. Jedes Befehlsformat kann mit jedem Ausgangsmodus verwendet werden.
Bevorzugt sollten Sie mit dem Nachkommastellen Format arbeiten, da dies auch bei niedriger Geschwindigkeit gleichmäßige Schritte gewährleistet. Ohne Nachkommastellen kann die Pulsbreite mehr variieren als erwartet, wenn die Geschwindigkeit nahe 1 count pro Feldbus Periode ist.
Beachten Sie, dass die EEO Funktion auch weiterhin in die richtige Richtung arbeitet, wenn der 16-Bit überläuft, so dass die Controller Trajektorie nicht auf 16-Bit-Bereiche beschränkt ist. Die maximale Soll-Geschwindigkeit wird üblicherweise durch die Eingänge der Schrittmotor-Steuerung, durch Signaltreiber und Empfänger begrenzt. Zusätzlich sollte die geforderte Soll-Geschwindigkeit weniger als 65536/4 pro Feldbus Periode betragen, um dem Interpolator die Möglichkeit zu geben, die Richtung aus aufeinander folgenden Signalen zu erkennen, und eine gewisse Variation in Befehls Timing zu ermöglichen.
Beispiel 1 (EtherCAT): Kommando mit Nachkommastellen, Schrittmotor Steuerung mit Puls/Richtung
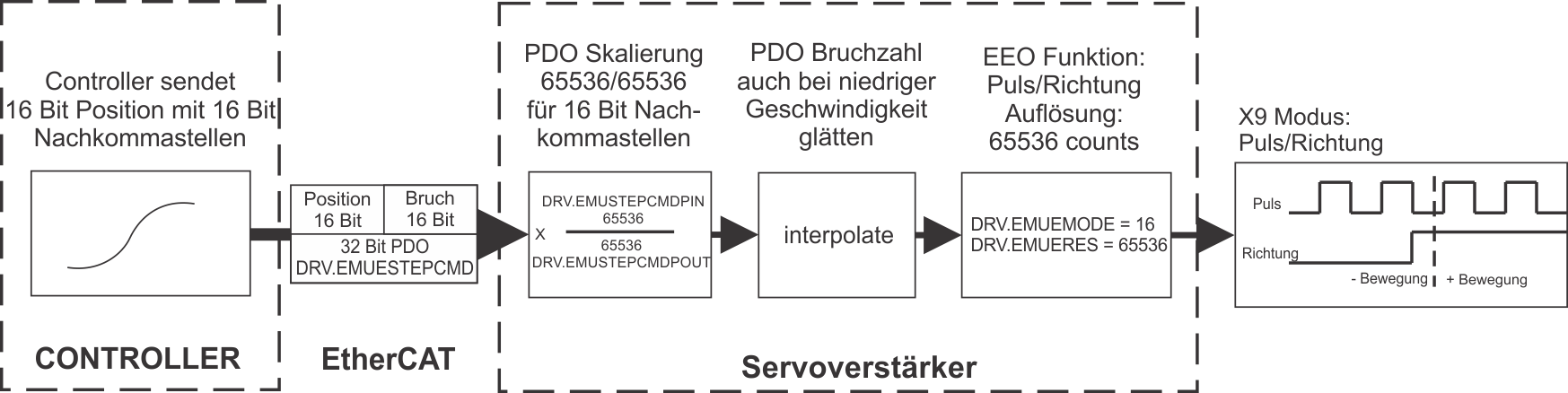
Der Controller sendet ein 32 Bit PDO mit 16 Bit Positionswert (integer) + 16 Bits Nachkommastellen; das PDO wird mit 65536/65536 skaliert und der EEO generiert Signale für Puls/Richtung Steuerungen.
Beispiel 2 (EtherCAT): Ganzzahliges Kommando, Schrittmotor Steuerung mit A/B Vervierfachung
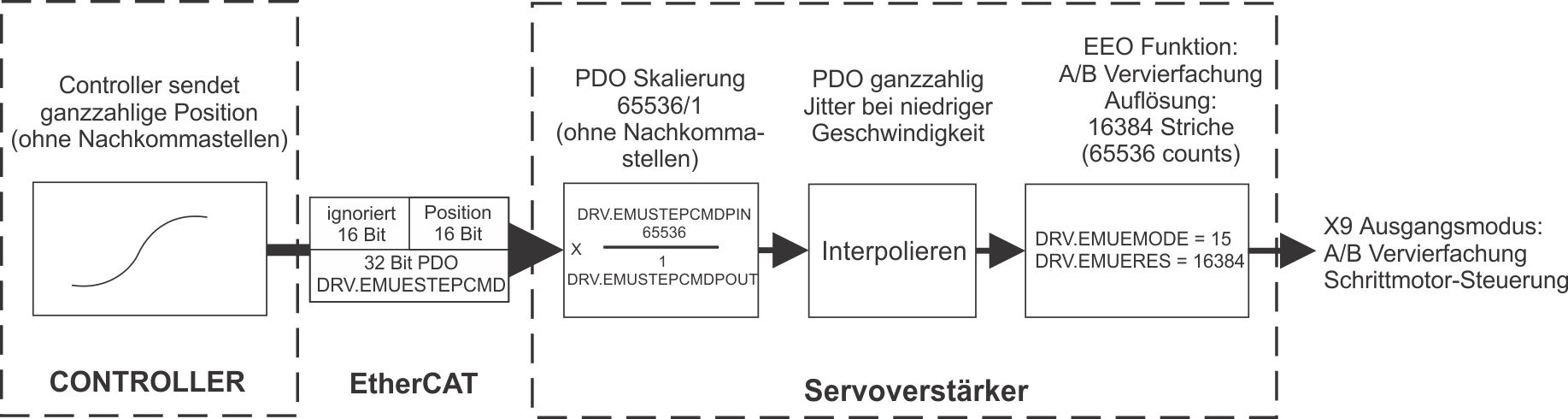
Der Controller sendet ein PDO mit 16 Bit Positionswert (integer) ohne Nachkommastellen; das PDO wird mit 65536/1 skaliert und der EEO generiert A/B Signale mit Vervierfachung.
Beispiel 3 (EtherCAT): Kommando mit Nachkommastellen, Schrittmotor Steuerung mit CW/CCW Signalen
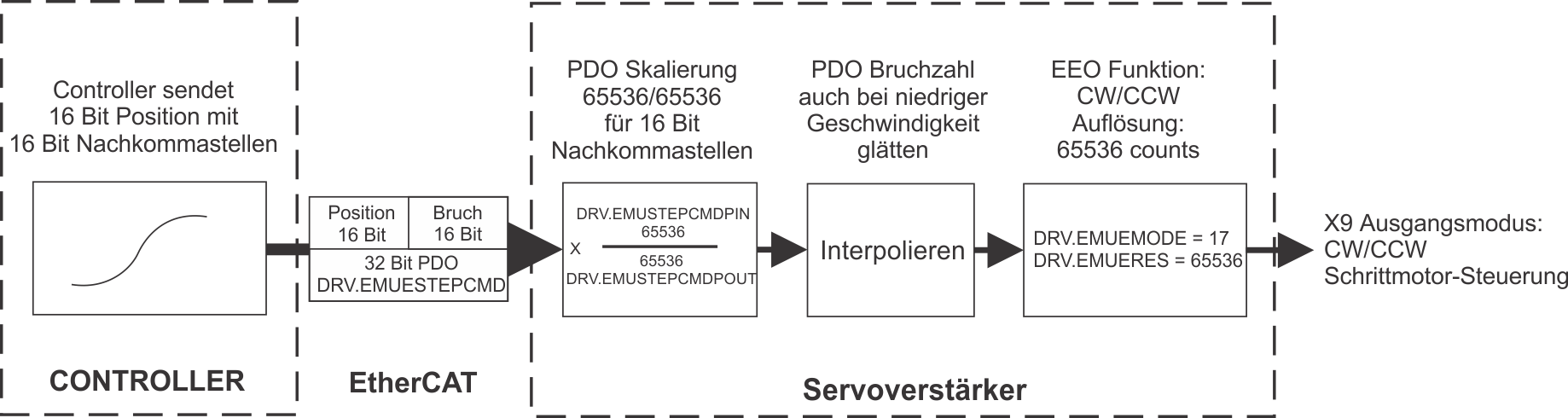
Der Controller sendet ein 32 Bit PDO mit 16 Bit Positionswert (integer) + 16 Bits Nachkommastellen; das PDO wird mit 65536/65536 skaliert und der EEO generiert Signale für CW/CCW Steuerungen.







